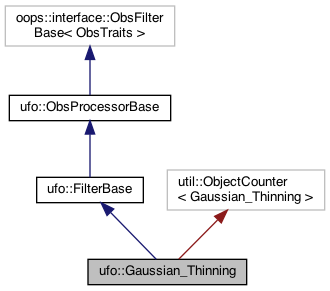
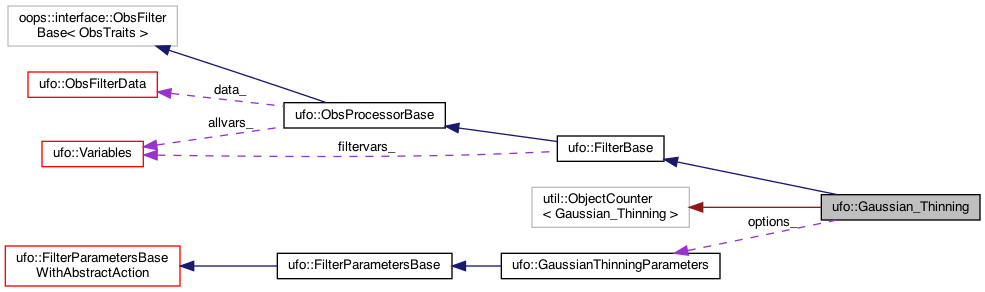
Group observations into grid cells and preserve only one observation in each cell. More...
#include <Gaussian_Thinning.h>
Public Types | |
| typedef GaussianThinningParameters | Parameters_ |
Public Member Functions | |
| Gaussian_Thinning (ioda::ObsSpace &obsdb, const GaussianThinningParameters ¶ms, std::shared_ptr< ioda::ObsDataVector< int > > flags, std::shared_ptr< ioda::ObsDataVector< float > > obserr) | |
 Public Member Functions inherited from ufo::FilterBase Public Member Functions inherited from ufo::FilterBase | |
| FilterBase (ioda::ObsSpace &, const FilterParametersBaseWithAbstractAction ¶meters, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| FilterBase (ioda::ObsSpace &, const eckit::Configuration &, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| ~FilterBase () | |
| Public Member Functions inherited from ufo::ObsProcessorBase | |
| ObsProcessorBase (ioda::ObsSpace &, bool deferToPost, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| ~ObsProcessorBase () | |
| void | preProcess () override |
| void | priorFilter (const GeoVaLs &) override |
| void | postFilter (const ioda::ObsVector &, const ioda::ObsVector &, const ObsDiagnostics &) override |
| oops::Variables | requiredVars () const override |
| oops::Variables | requiredHdiagnostics () const override |
Static Public Member Functions | |
| static const std::string | classname () |
Private Member Functions | |
| void | print (std::ostream &) const override |
| void | applyFilter (const std::vector< bool > &, const Variables &, std::vector< std::vector< bool >> &) const override |
| int | qcFlag () const override |
| ObsAccessor | createObsAccessor () const |
| void | groupObservationsBySpatialLocation (const std::vector< size_t > &validObsIds, const DistanceCalculator &distanceCalculator, const ObsAccessor &obsAccessor, RecursiveSplitter &splitter, std::vector< float > &distancesToBinCenter) const |
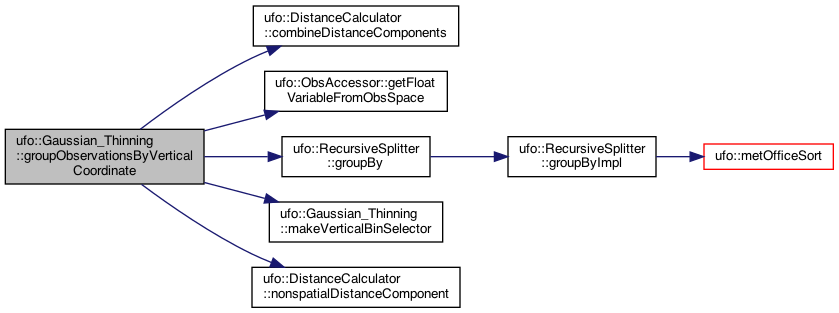
| void | groupObservationsByVerticalCoordinate (const std::vector< size_t > &validObsIds, const DistanceCalculator &distanceCalculator, const ObsAccessor &obsAccessor, RecursiveSplitter &splitter, std::vector< float > &distancesToBinCenter) const |
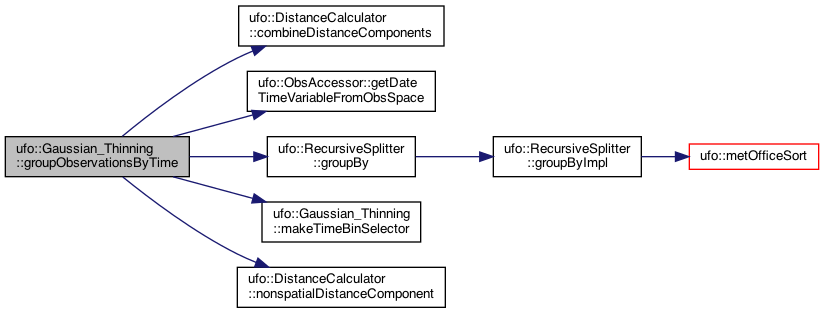
| void | groupObservationsByTime (const std::vector< size_t > &validObsIds, const DistanceCalculator &distanceCalculator, const ObsAccessor &obsAccessor, RecursiveSplitter &splitter, std::vector< float > &distancesToBinCenter) const |
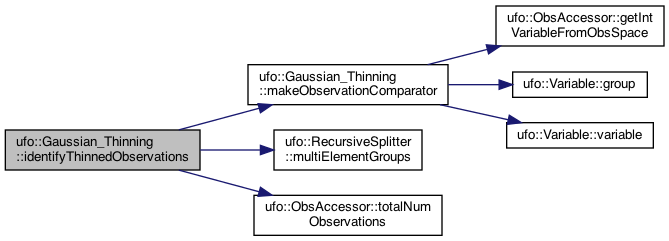
| std::vector< bool > | identifyThinnedObservations (const std::vector< size_t > &validObsIds, const ObsAccessor &obsAccessor, const RecursiveSplitter &splitter, const std::vector< float > &distancesToBinCenter) const |
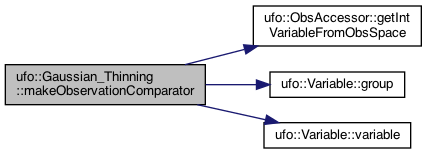
| std::function< bool(size_t, size_t)> | makeObservationComparator (const std::vector< size_t > &validObsIds, const std::vector< float > &distancesToBinCenter, const ObsAccessor &obsAccessor) const |
Static Private Member Functions | |
| static boost::optional< SpatialBinSelector > | makeSpatialBinSelector (const GaussianThinningParameters &options) |
| static std::unique_ptr< EquispacedBinSelectorBase > | makeVerticalBinSelector (const GaussianThinningParameters &options) |
| static std::unique_ptr< EquispacedBinSelectorBase > | makeTimeBinSelector (const GaussianThinningParameters &options, const util::DateTime &windowStart, const util::DateTime &windowEnd, util::DateTime &timeOffset) |
| static std::unique_ptr< DistanceCalculator > | makeDistanceCalculator (const GaussianThinningParameters &options) |
Private Attributes | |
| GaussianThinningParameters | options_ |
Additional Inherited Members | |
| Protected Attributes inherited from ufo::FilterBase | |
| const eckit::LocalConfiguration | config_ |
| ufo::Variables | filtervars_ |
| Protected Attributes inherited from ufo::ObsProcessorBase | |
| ioda::ObsSpace & | obsdb_ |
| std::shared_ptr< ioda::ObsDataVector< int > > | flags_ |
| std::shared_ptr< ioda::ObsDataVector< float > > | obserr_ |
| ufo::Variables | allvars_ |
| ObsFilterData | data_ |
Detailed Description
Group observations into grid cells and preserve only one observation in each cell.
Cell assignment can be based on an arbitrary combination of:
- horizontal position
- vertical position (in terms of height or pressure)
- time
- category (arbitrary integer associated with each observation).
Selection of the observation to preserve in each cell is based on
- its position in the cell
- optionally, its priority.
See GaussianThinningParameters for the documentation of the available options.
Definition at line 59 of file Gaussian_Thinning.h.
Member Typedef Documentation
◆ Parameters_
The type of parameters accepted by the constructor of this filter. This typedef is used by the FilterFactory.
Definition at line 64 of file Gaussian_Thinning.h.
Constructor & Destructor Documentation
◆ Gaussian_Thinning()
| ufo::Gaussian_Thinning::Gaussian_Thinning | ( | ioda::ObsSpace & | obsdb, |
| const GaussianThinningParameters & | params, | ||
| std::shared_ptr< ioda::ObsDataVector< int > > | flags, | ||
| std::shared_ptr< ioda::ObsDataVector< float > > | obserr | ||
| ) |
Definition at line 40 of file Gaussian_Thinning.cc.
Member Function Documentation
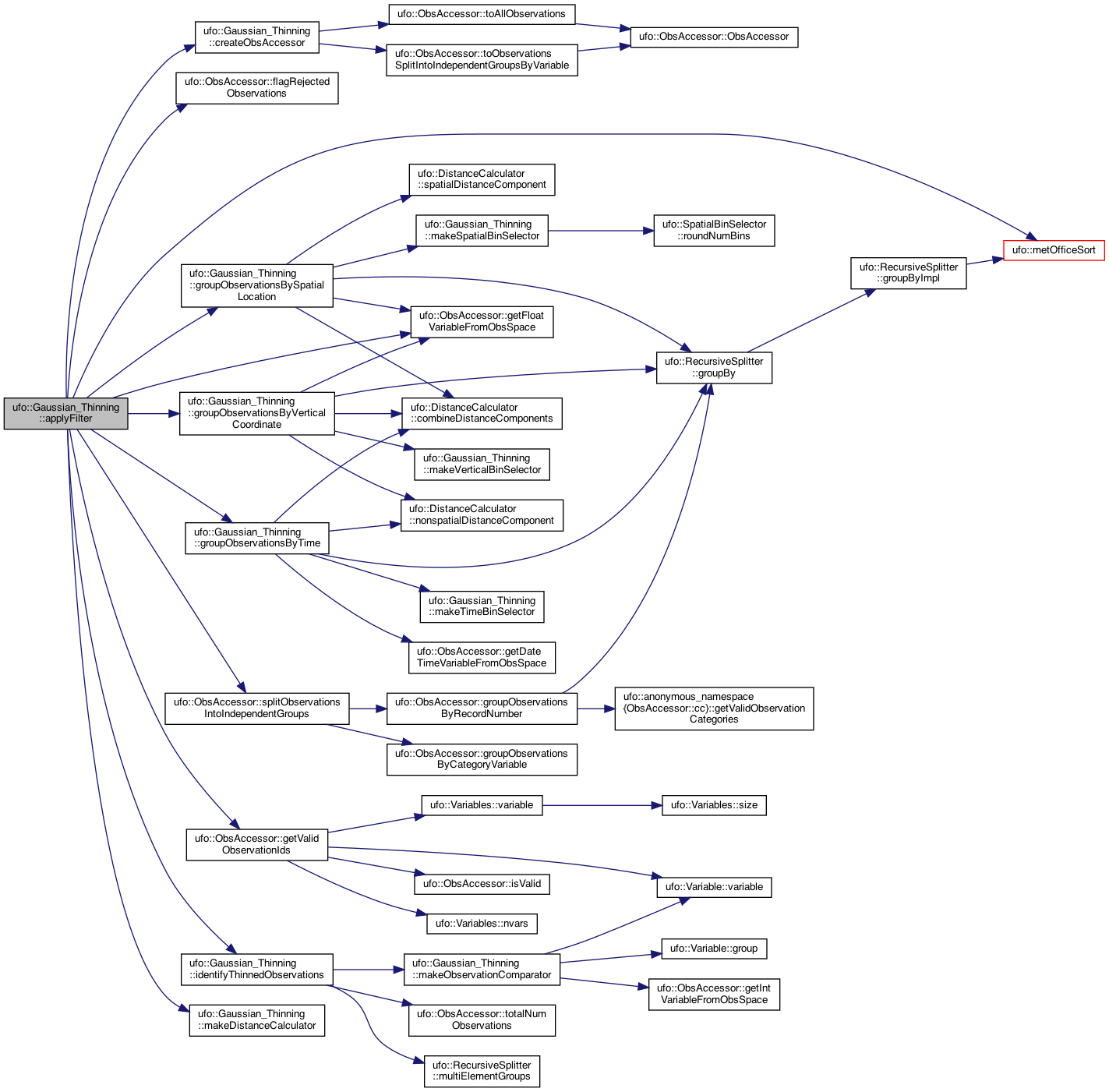
◆ applyFilter()
|
overrideprivatevirtual |
Implements ufo::FilterBase.
Definition at line 51 of file Gaussian_Thinning.cc.
◆ classname()
|
inlinestatic |
Definition at line 66 of file Gaussian_Thinning.h.
◆ createObsAccessor()
|
private |
Definition at line 84 of file Gaussian_Thinning.cc.


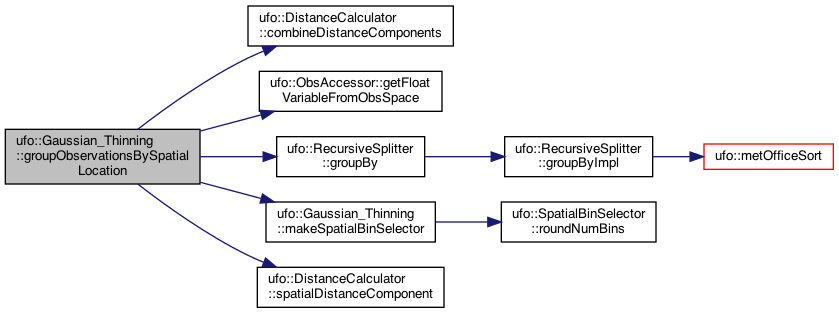
◆ groupObservationsBySpatialLocation()
|
private |
Definition at line 111 of file Gaussian_Thinning.cc.

◆ groupObservationsByTime()
|
private |
Definition at line 261 of file Gaussian_Thinning.cc.

◆ groupObservationsByVerticalCoordinate()
|
private |
Definition at line 198 of file Gaussian_Thinning.cc.

◆ identifyThinnedObservations()
|
private |
Definition at line 347 of file Gaussian_Thinning.cc.

◆ makeDistanceCalculator()
|
staticprivate |

◆ makeObservationComparator()
|
private |
Definition at line 372 of file Gaussian_Thinning.cc.

◆ makeSpatialBinSelector()
|
staticprivate |
Definition at line 165 of file Gaussian_Thinning.cc.


◆ makeTimeBinSelector()
|
staticprivate |

◆ makeVerticalBinSelector()
|
staticprivate |

◆ print()
|
overrideprivatevirtual |
Implements ufo::FilterBase.
Definition at line 401 of file Gaussian_Thinning.cc.
◆ qcFlag()
|
inlineoverrideprivatevirtual |
Implements ufo::FilterBase.
Definition at line 76 of file Gaussian_Thinning.h.
Member Data Documentation
◆ options_
|
private |
Definition at line 125 of file Gaussian_Thinning.h.
The documentation for this class was generated from the following files: