Fortran module containing the routines to perform a Marquardt-Levenberg minimization. More...
Functions/Subroutines | |
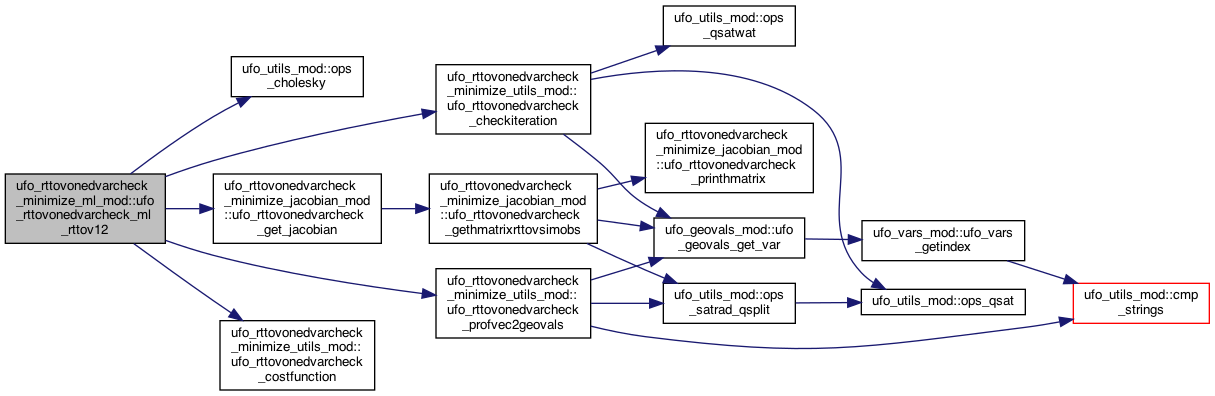
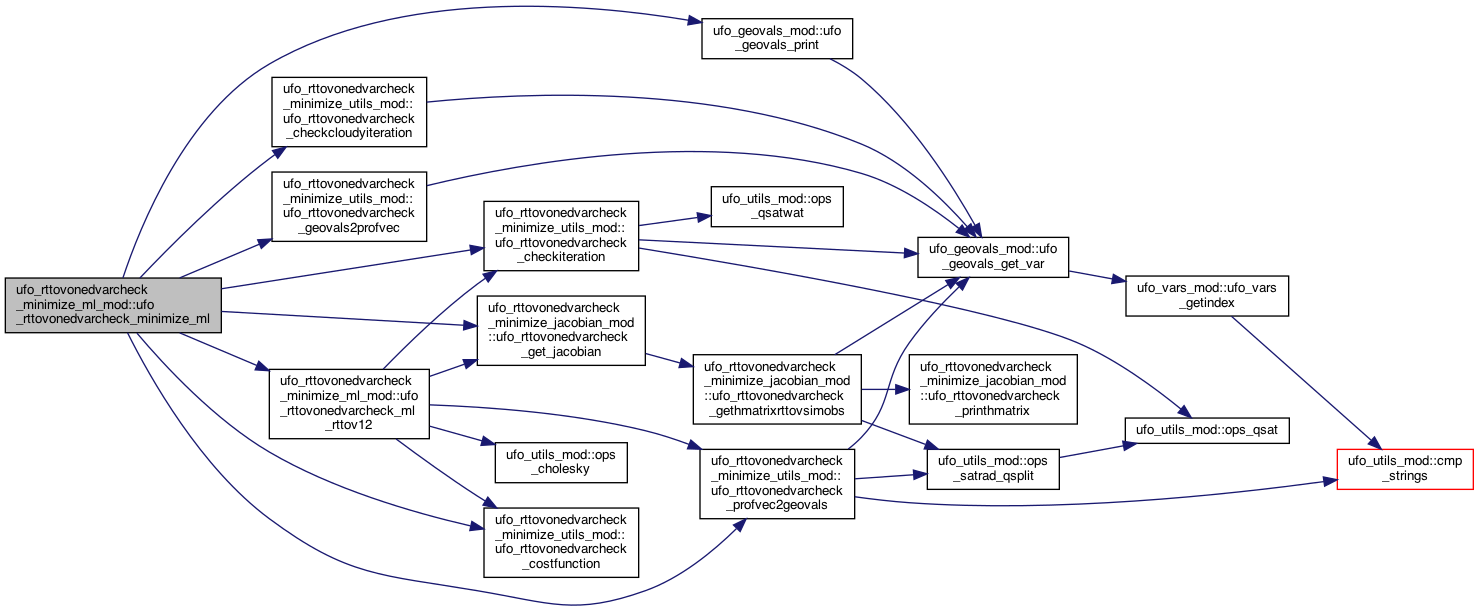
| subroutine, public | ufo_rttovonedvarcheck_minimize_ml (self, ob, r_matrix, b_matrix, b_inv, b_sigma, local_geovals, hofxdiags, rttov_simobs, profile_index, onedvar_success) |
| Perform a minimization using the Marquardt-Levenberg method. More... | |
| subroutine | ufo_rttovonedvarcheck_ml_rttov12 (self, DeltaBT, nChans, ob, H_Matrix, H_Matrix_T, nprofelements, profile_index, DeltaProfile, GuessProfile, BackProfile, b_inv, r_matrix, geovals, hofxdiags, rttov_simobs, gamma, Jold, Status) |
| Updates the profile vector during the Marquardt-Levenberg minimization. More... | |
Detailed Description
Fortran module containing the routines to perform a Marquardt-Levenberg minimization.
Function/Subroutine Documentation
◆ ufo_rttovonedvarcheck_minimize_ml()
| subroutine, public ufo_rttovonedvarcheck_minimize_ml_mod::ufo_rttovonedvarcheck_minimize_ml | ( | type(ufo_rttovonedvarcheck), intent(inout) | self, |
| type(ufo_rttovonedvarcheck_ob), intent(inout) | ob, | ||
| type(ufo_rttovonedvarcheck_rsubmatrix), intent(in) | r_matrix, | ||
| real(kind_real), dimension(:,:), intent(in) | b_matrix, | ||
| real(kind_real), dimension(:,:), intent(in) | b_inv, | ||
| real(kind_real), dimension(:), intent(in) | b_sigma, | ||
| type(ufo_geovals), intent(inout) | local_geovals, | ||
| type(ufo_geovals), intent(inout) | hofxdiags, | ||
| type(ufo_radiancerttov), intent(inout) | rttov_simobs, | ||
| type(ufo_rttovonedvarcheck_profindex), intent(in) | profile_index, | ||
| logical, intent(out) | onedvar_success | ||
| ) |
Perform a minimization using the Marquardt-Levenberg method.
Heritage: Ops_SatRad_MinimizeML_RTTOV12.f90
Find the most probable atmospheric state vector by minimizing a cost function through a series of iterations. if a solution exists, the iterations will converge when the iterative increments are acceptably small. A limit on the total number of iterations allowed is imposed.
Using the formulation given by Rodgers (1976) :
Delta_x = xn + (xb-xn).I' + Wn.(ym-y(xn) - H.(xb-xn))
where:
x is an atmospheric state vector, subscripted b=background,n=nth iteration
I' is a diagonal matrix with I'(J,J) = B_damped(J,J)/B_undamped(J,J) although, however, damping will no longer be used
Wn = B.Hn'.(Hn.B.Hn'+R)^-1
B is the background error covariance matrix
R is the combined forward model and ob error covariance matrix
Delta_x is checked for convergence after each iteration
The loop is exited with convergence if either of the following conditions are true, depending on whether UseJforConvergence is true or false
- if UseJforConvergence is true then the change in total cost function from one iteration to the next is sufficiently small to imply convergence
- if UseJforConvergence is false then the increments to the atmospheric state vector are sufficiently small to imply convergence at an acceptable solution
Either of the following two conditions will cause the 1dvar to stop and exit with an error.
- The increments are sufficiently large to suppose a solution will not be found.
- The maximum number of allowed iterations has been reached. In most cases, one of the above criteria will have occurred.
References:
Rodgers, Retrieval of atmospheric temperature and composition from remote measurements of thermal radiation, Rev. Geophys.Sp.Phys. 14, 1976.
Eyre, Inversion of cloudy satellite sounding radiances by nonlinear optimal estimation. I: Theory and simulation for TOVS,QJ,July 89.
- Date
- 09/06/2020: Created
- Parameters
-
[in,out] self structure containing settings [in,out] ob satellite metadata [in] r_matrix observation error covariance [in] b_matrix state error covariance [in] b_inv inverse state error covariance [in] b_sigma standard deviations of the state error covariance diagonal [in,out] local_geovals model data at obs location [in,out] hofxdiags model data containing the jacobian [in,out] rttov_simobs rttov simulated obs object [in] profile_index index array for x vector [out] onedvar_success convergence flag
Definition at line 82 of file ufo_rttovonedvarcheck_minimize_ml_mod.f90.

◆ ufo_rttovonedvarcheck_ml_rttov12()
|
private |
Updates the profile vector during the Marquardt-Levenberg minimization.
Heritage: Ops_SatRad_MarquardtLevenberg_RTTOV12.f90
Updates the profile vector DeltaProfile according to Rodgers (1976), Eqn. 100, extended to allow for additional cost function terms and Marquardt-Levenberg descent.
x_(n+1) = xb + U^-1.V
where
U=(B^-1 + H^T R^-1 H + J2)
V=H^T R^-1 [(ym-y(x_n))+H(x_n-xb)] - J1
and
J_extra=J0+J1.(x-xb)+(x-xb)^T.J2.(x-xb) is the additional cost function
x is an atmospheric state vector, subscripted b=background,n=nth iteration
ym is the measurement vector (i.e. observed brightness temperatures)
y(xn) is the observation vector calculated for xn
ym and y(xn) are not used individually at all, hence these are input
as a difference vector DeltaBT.
B is the background error covariance matrix
R is the combined forward model and ob error covariance matrix
H is the forward model gradient (w.r.t. xn) matrix
H' is the transpose of H
When J_extra is zero this is simply Rogers (1976), Eqn. 100.
U^-1.V is solved using Cholesky decomposition.
This routine should be used when:
- The length of the observation vector is greater than the length of the state vector,
- Additional cost function terms are provided and
- where Newtonian minimisation is desired.
References:
Rodgers, Retrieval of atmospheric temperature and composition from remote measurements of thermal radiation, Rev. Geophys.Sp.Phys. 14, 1976.
Rodgers, Inverse Methods for Atmospheres: Theory and Practice. World Scientific Publishing, 2000.
- Date
- 09/06/2020: Created
- Parameters
-
[in] self structure containing settings [in] deltabt y-y(x) [in] nchans number of channels [in,out] ob satellite metadata [in] h_matrix Jacobian [in] h_matrix_t transpose of the Jacobian [in] nprofelements number of profile elements [in] profile_index index array for x vector [in,out] deltaprofile x_(n+1) - xb [in,out] guessprofile x_(n+1) [in] backprofile xb [in] b_inv inverse of the state error covariance [in] r_matrix observation error covariance [in,out] geovals model data at obs location [in,out] hofxdiags model data containing the jacobian [in,out] gamma steepness of descent parameter [in,out] jold previous steps cost which gets update by good step [out] status code to capture failed Cholesky decomposition
Definition at line 452 of file ufo_rttovonedvarcheck_minimize_ml_mod.f90.