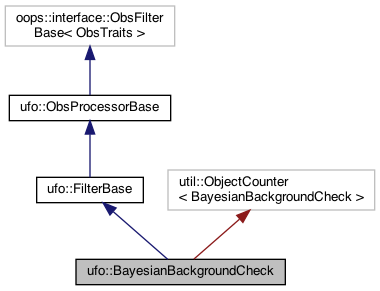
BayesianBackgroundCheck: check observation closeness to background, accounting for probability of gross error, i.e. that observation is bad. More...
#include <BayesianBackgroundCheck.h>
Public Types | |
| typedef BayesianBackgroundCheckParameters | Parameters_ |
Public Member Functions | |
| BayesianBackgroundCheck (ioda::ObsSpace &obsdb, const Parameters_ ¶meters, std::shared_ptr< ioda::ObsDataVector< int > > flags, std::shared_ptr< ioda::ObsDataVector< float > > obserr) | |
| ~BayesianBackgroundCheck () | |
 Public Member Functions inherited from ufo::FilterBase Public Member Functions inherited from ufo::FilterBase | |
| FilterBase (ioda::ObsSpace &, const FilterParametersBaseWithAbstractAction ¶meters, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| FilterBase (ioda::ObsSpace &, const eckit::Configuration &, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| ~FilterBase () | |
| Public Member Functions inherited from ufo::ObsProcessorBase | |
| ObsProcessorBase (ioda::ObsSpace &, bool deferToPost, std::shared_ptr< ioda::ObsDataVector< int > >, std::shared_ptr< ioda::ObsDataVector< float > >) | |
| ~ObsProcessorBase () | |
| void | preProcess () override |
| void | priorFilter (const GeoVaLs &) override |
| void | postFilter (const ioda::ObsVector &, const ioda::ObsVector &, const ObsDiagnostics &) override |
| oops::Variables | requiredVars () const override |
| oops::Variables | requiredHdiagnostics () const override |
Static Public Member Functions | |
| static const std::string | classname () |
Private Member Functions | |
| void | print (std::ostream &) const override |
| void | applyFilter (const std::vector< bool > &apply, const Variables &filtervars, std::vector< std::vector< bool >> &flagged) const override |
| Apply Bayesian background check filter. Return flagged=true for rejected obs. More... | |
| int | qcFlag () const override |
| Return bayesianQC flag for observations rejected by Bayesian BG check. More... | |
| Variable | backgrErrVariable (const Variable &filterVariable) const |
| Return the name of the variable containing the background error estimate of the specified filter variable. More... | |
| template<class T > | |
| std::vector< T > | reduceVector (const std::vector< T > &vector_full, const std::vector< size_t > &j_reduced) const |
| Reduce a vector to only the elements for which j_reduced=true. More... | |
| template<class T > | |
| void | unreduceVector (const std::vector< T > &vector_reduced, std::vector< T > &vector_full, const std::vector< size_t > &j_reduced) const |
| Copy a reduced vector back into the correct indices of the full vector. More... | |
Private Attributes | |
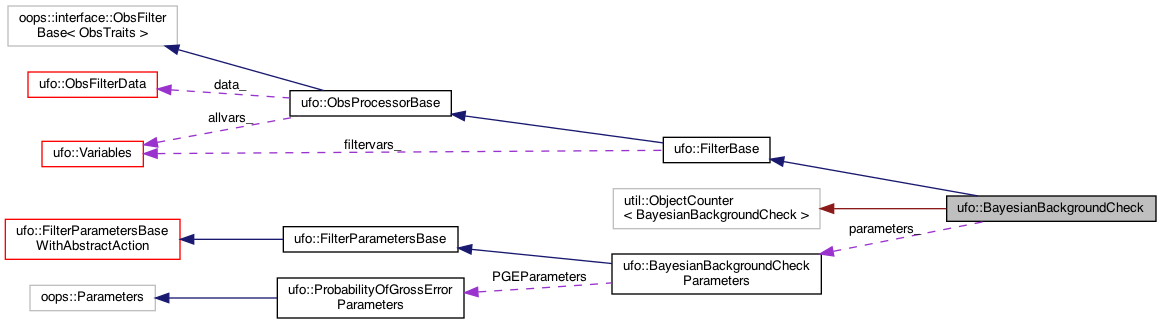
| Parameters_ | parameters_ |
Additional Inherited Members | |
| Protected Attributes inherited from ufo::FilterBase | |
| const eckit::LocalConfiguration | config_ |
| ufo::Variables | filtervars_ |
| Protected Attributes inherited from ufo::ObsProcessorBase | |
| ioda::ObsSpace & | obsdb_ |
| std::shared_ptr< ioda::ObsDataVector< int > > | flags_ |
| std::shared_ptr< ioda::ObsDataVector< float > > | obserr_ |
| ufo::Variables | allvars_ |
| ObsFilterData | data_ |
Detailed Description
BayesianBackgroundCheck: check observation closeness to background, accounting for probability of gross error, i.e. that observation is bad.
Flag observations whose values differ from their model equivalents by too much. "Too much" depends on the uncertainties of both observation and model background, and the prior probability of the observation being "bad", or in gross error. Can apply to scalar or vector observation types on single-level. (Cannot handle profiles.) Calls function ufo::BayesianPGEUpdate.
Requires the following be specified in .yaml, under
obs filters:
- filter: Bayesian Background Check
- prob density bad obs: uniform probability density that observation is "bad", i.e. in gross error;
- initial prob gross error: initial PGE value of the uniform probability distribution, before adjustment depending on obs-BG closeness;
May also specify the following optional parameters (defaults in ufo/utils/ProbabilityOfGrossErrorParameters.h):
- PGE threshold: fail if after-check PGE exceeds this value;
- obs minus BG threshold: fail if \(([y-H(x)]/{\sigma})^2\) exceeds this;
- max exponent: maximum allowed value of the exponent in the 'good' probability distribution;
- obs error multiplier: weight of observation error in combined error variance;
- BG error multiplier: weight of background error in combined error variance.
Definition at line 75 of file BayesianBackgroundCheck.h.
Member Typedef Documentation
◆ Parameters_
The type of parameters accepted by the constructor of this filter. This typedef is used by the FilterFactory.
Definition at line 80 of file BayesianBackgroundCheck.h.
Constructor & Destructor Documentation
◆ BayesianBackgroundCheck()
| ufo::BayesianBackgroundCheck::BayesianBackgroundCheck | ( | ioda::ObsSpace & | obsdb, |
| const Parameters_ & | parameters, | ||
| std::shared_ptr< ioda::ObsDataVector< int > > | flags, | ||
| std::shared_ptr< ioda::ObsDataVector< float > > | obserr | ||
| ) |
BayesianBackgroundCheck: check observation closeness to background, accounting for probability of gross error, i.e. that observation is bad.
Definition at line 34 of file BayesianBackgroundCheck.cc.

◆ ~BayesianBackgroundCheck()
| ufo::BayesianBackgroundCheck::~BayesianBackgroundCheck | ( | ) |
Definition at line 51 of file BayesianBackgroundCheck.cc.
Member Function Documentation
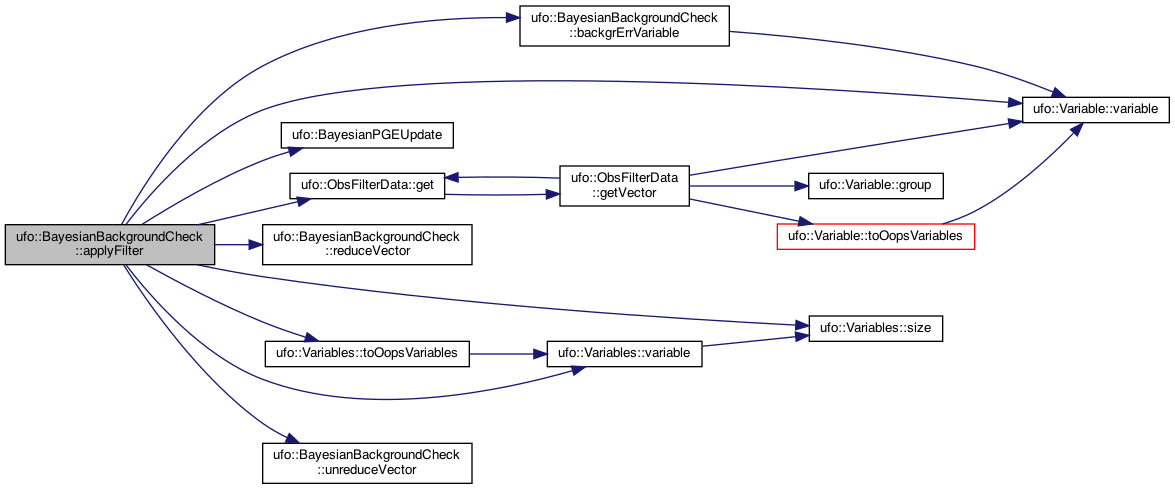
◆ applyFilter()
|
overrideprivatevirtual |
Apply Bayesian background check filter. Return flagged=true for rejected obs.
Apply the Bayesian background check filter.
Implements ufo::FilterBase.
Definition at line 93 of file BayesianBackgroundCheck.cc.
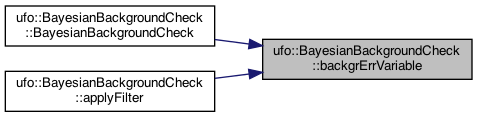
◆ backgrErrVariable()
|
private |
Return the name of the variable containing the background error estimate of the specified filter variable.
Return the name of the variable containing the background error estimate of the specified filter variable.
Definition at line 59 of file BayesianBackgroundCheck.cc.

◆ classname()
|
inlinestatic |
Definition at line 82 of file BayesianBackgroundCheck.h.
◆ print()
|
overrideprivatevirtual |
Implements ufo::FilterBase.
Definition at line 266 of file BayesianBackgroundCheck.cc.
◆ qcFlag()
|
inlineoverrideprivatevirtual |
Return bayesianQC flag for observations rejected by Bayesian BG check.
Implements ufo::FilterBase.
Definition at line 97 of file BayesianBackgroundCheck.h.
◆ reduceVector()
|
private |
Reduce a vector to only the elements for which j_reduced=true.
- Parameters
-
[in] vector_full full vector, [in] j_reduced indices of vector_full to be copied into...
- Returns
- vector_reduced.
Definition at line 67 of file BayesianBackgroundCheck.cc.

◆ unreduceVector()
|
private |
Copy a reduced vector back into the correct indices of the full vector.
- Parameters
-
[in] vector_reduced reduced vector to restore to... [in,out] vector_full full vector, [in] j_reduced indices of vector_full to be populated.
Definition at line 81 of file BayesianBackgroundCheck.cc.

Member Data Documentation
◆ parameters_
|
private |
Definition at line 119 of file BayesianBackgroundCheck.h.
The documentation for this class was generated from the following files: