Jo Cost Function. More...
#include <CostJo.h>
Public Member Functions | |
| CostJo (const eckit::Configuration &, const eckit::mpi::Comm &, const util::DateTime &, const util::DateTime &, const eckit::mpi::Comm &ctime=oops::mpi::myself()) | |
| Construct \( J_o\) from \( R\) and \( y_{obs}\). More... | |
| virtual | ~CostJo () |
| Destructor. More... | |
| void | setPostProc (const CtrlVar_ &, const eckit::Configuration &, PostProc_ &) override |
| Initialize \( J_o\) before starting the integration of the model. More... | |
| double | computeCost () override |
| Finalize \( J_o\) after the integration of the model. More... | |
| void | setPostProcTraj (const CtrlVar_ &, const eckit::Configuration &, const Geometry_ &, PostProcTLAD_ &) override |
| Initialize \( J_o\) for the trajectory run. More... | |
| void | computeCostTraj () override |
| Finish cost computation and trajectory handling after nonlinear model integration. More... | |
| void | setPostProcTL (const CtrlInc_ &, PostProcTLAD_ &) const override |
| Initialize \( J_o\) before starting the TL run. More... | |
| void | computeCostTL (const CtrlInc_ &, GeneralizedDepartures &) const override |
| Finish cost computation after TL model integration. More... | |
| void | computeCostAD (std::shared_ptr< const GeneralizedDepartures >, CtrlInc_ &, PostProcTLAD_ &) const override |
| Initialize \( J_o\) before starting the AD run. More... | |
| void | setPostProcAD () const override |
| Adjoint ot setPostProcTL (clean-up) More... | |
| std::unique_ptr< GeneralizedDepartures > | multiplyCovar (const GeneralizedDepartures &) const override |
| Multiply by \( R\) and \( R^{-1}\). More... | |
| std::unique_ptr< GeneralizedDepartures > | multiplyCoInv (const GeneralizedDepartures &) const override |
| std::unique_ptr< GeneralizedDepartures > | newDualVector () const override |
| Provide new departure. More... | |
| std::unique_ptr< GeneralizedDepartures > | newGradientFG () const override |
| Return gradient at first guess ie \( R^{-1} {\cal H}(x^t ) - y\). More... | |
| void | resetLinearization () override |
| Reset obs operator trajectory. More... | |
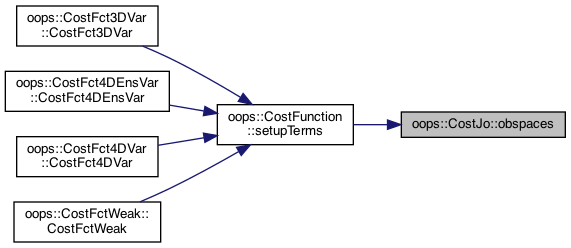
| const ObsSpaces_ & | obspaces () const |
| Accessor... More... | |
 Public Member Functions inherited from oops::CostTermBase< MODEL, OBS > Public Member Functions inherited from oops::CostTermBase< MODEL, OBS > | |
| virtual | ~CostTermBase () |
| Destructor. More... | |
Private Types | |
| typedef ControlVariable< MODEL, OBS > | CtrlVar_ |
| typedef ControlIncrement< MODEL, OBS > | CtrlInc_ |
| typedef Departures< OBS > | Departures_ |
| typedef Observations< OBS > | Observations_ |
| typedef Geometry< MODEL > | Geometry_ |
| typedef GetValuePosts< MODEL, OBS > | GetValuePosts_ |
| typedef State< MODEL > | State_ |
| typedef ObsErrors< OBS > | ObsErrors_ |
| typedef ObsSpaces< OBS > | ObsSpaces_ |
| typedef Observers< MODEL, OBS > | Observers_ |
| typedef ObserversTLAD< MODEL, OBS > | ObserversTLAD_ |
| typedef PostProcessor< State_ > | PostProc_ |
| typedef PostProcessorTLAD< MODEL > | PostProcTLAD_ |
Private Attributes | |
| const eckit::LocalConfiguration | obsconf_ |
| ObsSpaces_ | obspaces_ |
| std::unique_ptr< Observations_ > | yobs_ |
| ObsErrors_ | Rmat_ |
| Observers_ | observers_ |
| std::unique_ptr< Departures_ > | gradFG_ |
| Jo Gradient at first guess : \( R^{-1} (H(x_{fg})-y_{obs}) \). More... | |
| std::shared_ptr< ObserversTLAD_ > | obstlad_ |
| Linearized observation operators. More... | |
| std::unique_ptr< eckit::LocalConfiguration > | currentConf_ |
| Configuration for current initialize/finalize pair. More... | |
Detailed Description
template<typename MODEL, typename OBS>
class oops::CostJo< MODEL, OBS >
Jo Cost Function.
The CostJo class encapsulates the Jo term of the cost function. The Observers to be called during the model integration is managed inside the CostJo class.
Member Typedef Documentation
◆ CtrlInc_
|
private |
◆ CtrlVar_
|
private |
◆ Departures_
|
private |
◆ Geometry_
|
private |
◆ GetValuePosts_
|
private |
◆ ObsErrors_
|
private |
◆ Observations_
|
private |
◆ Observers_
|
private |
◆ ObserversTLAD_
|
private |
◆ ObsSpaces_
|
private |
◆ PostProc_
|
private |
◆ PostProcTLAD_
|
private |
◆ State_
|
private |
Constructor & Destructor Documentation
◆ CostJo()
| oops::CostJo< MODEL, OBS >::CostJo | ( | const eckit::Configuration & | joConf, |
| const eckit::mpi::Comm & | comm, | ||
| const util::DateTime & | winbgn, | ||
| const util::DateTime & | winend, | ||
| const eckit::mpi::Comm & | ctime = oops::mpi::myself() |
||
| ) |
◆ ~CostJo()
|
virtual |
Member Function Documentation
◆ computeCost()
|
overridevirtual |
Finalize \( J_o\) after the integration of the model.
Implements oops::CostTermBase< MODEL, OBS >.
Definition at line 169 of file CostJo.h.
◆ computeCostAD()
|
overridevirtual |
Initialize \( J_o\) before starting the AD run.
Implements oops::CostTermBase< MODEL, OBS >.
Definition at line 280 of file CostJo.h.

◆ computeCostTL()
|
overridevirtual |
Finish cost computation after TL model integration.
Implements oops::CostTermBase< MODEL, OBS >.
Definition at line 269 of file CostJo.h.

◆ computeCostTraj()
|
overridevirtual |
Finish cost computation and trajectory handling after nonlinear model integration.
Implements oops::CostTermBase< MODEL, OBS >.
◆ multiplyCoInv()
|
overridevirtual |
Implements oops::CostTermBase< MODEL, OBS >.
◆ multiplyCovar()
|
overridevirtual |
Multiply by \( R\) and \( R^{-1}\).
Implements oops::CostTermBase< MODEL, OBS >.
◆ newDualVector()
|
overridevirtual |
Provide new departure.
Implements oops::CostTermBase< MODEL, OBS >.
◆ newGradientFG()
|
overridevirtual |
Return gradient at first guess ie \( R^{-1} {\cal H}(x^t ) - y\).
Implements oops::CostTermBase< MODEL, OBS >.
◆ obspaces()
|
inline |
◆ resetLinearization()
|
overridevirtual |
Reset obs operator trajectory.
Implements oops::CostTermBase< MODEL, OBS >.
◆ setPostProc()
|
overridevirtual |
Initialize \( J_o\) before starting the integration of the model.
Implements oops::CostTermBase< MODEL, OBS >.
Definition at line 154 of file CostJo.h.
◆ setPostProcAD()
|
overridevirtual |
Adjoint ot setPostProcTL (clean-up)
Implements oops::CostTermBase< MODEL, OBS >.
◆ setPostProcTL()
|
overridevirtual |
Initialize \( J_o\) before starting the TL run.
Implements oops::CostTermBase< MODEL, OBS >.
◆ setPostProcTraj()
|
overridevirtual |
Initialize \( J_o\) for the trajectory run.
Implements oops::CostTermBase< MODEL, OBS >.
Definition at line 240 of file CostJo.h.

Member Data Documentation
◆ currentConf_
|
private |
◆ gradFG_
|
private |
◆ obsconf_
|
private |
◆ observers_
|
private |
◆ obspaces_
|
private |
◆ obstlad_
|
private |
◆ Rmat_
|
private |
◆ yobs_
|
private |
The documentation for this class was generated from the following file: